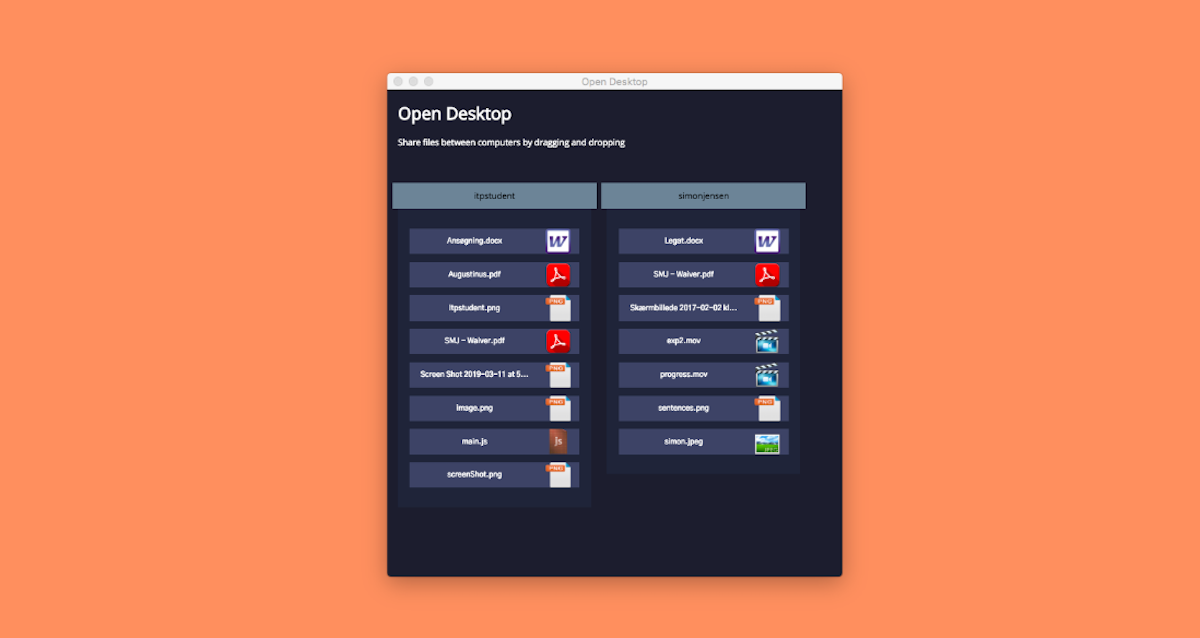
File sharing application
Real time biological feedback
Remote computer control application
Daily glucose Tracker
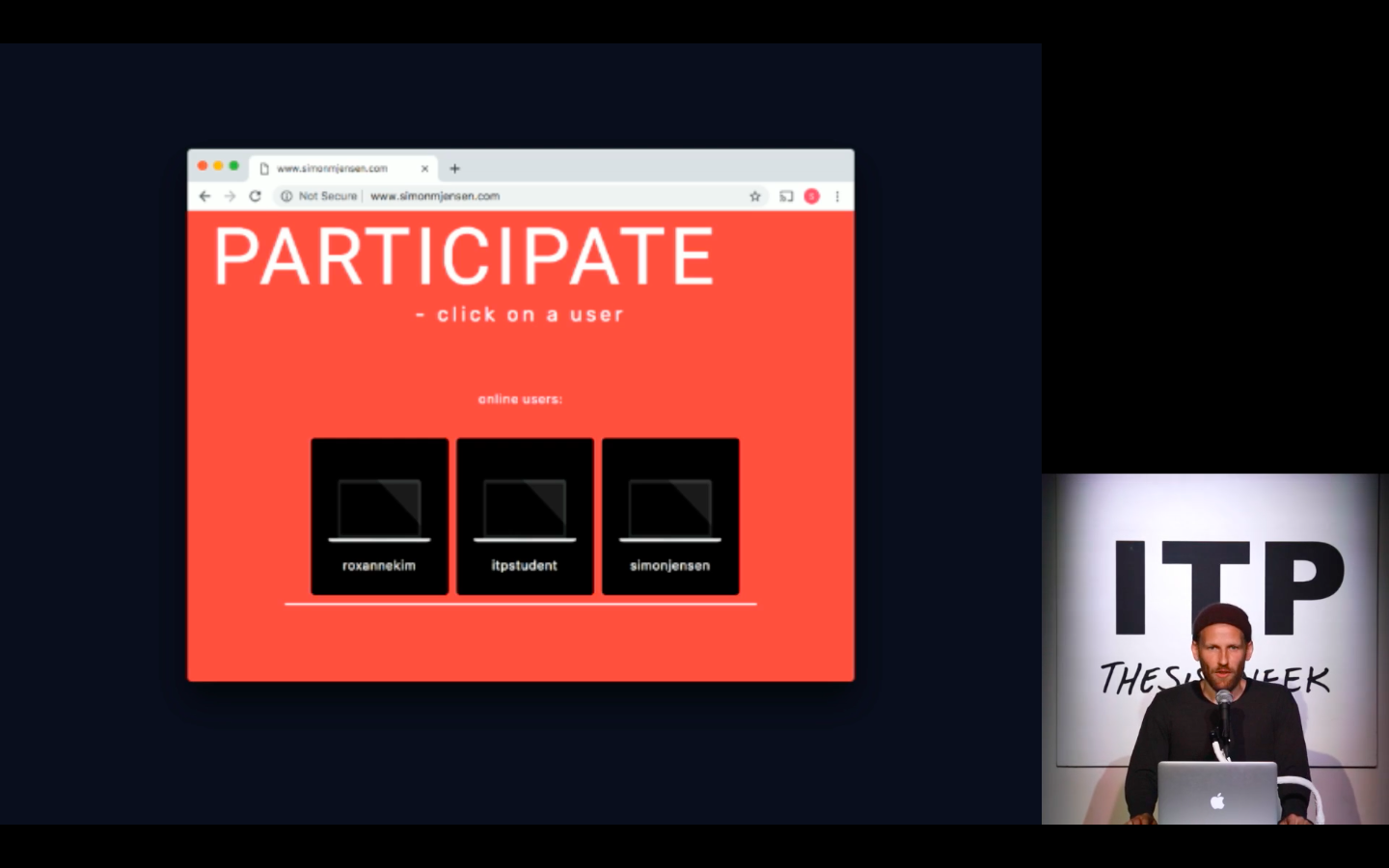
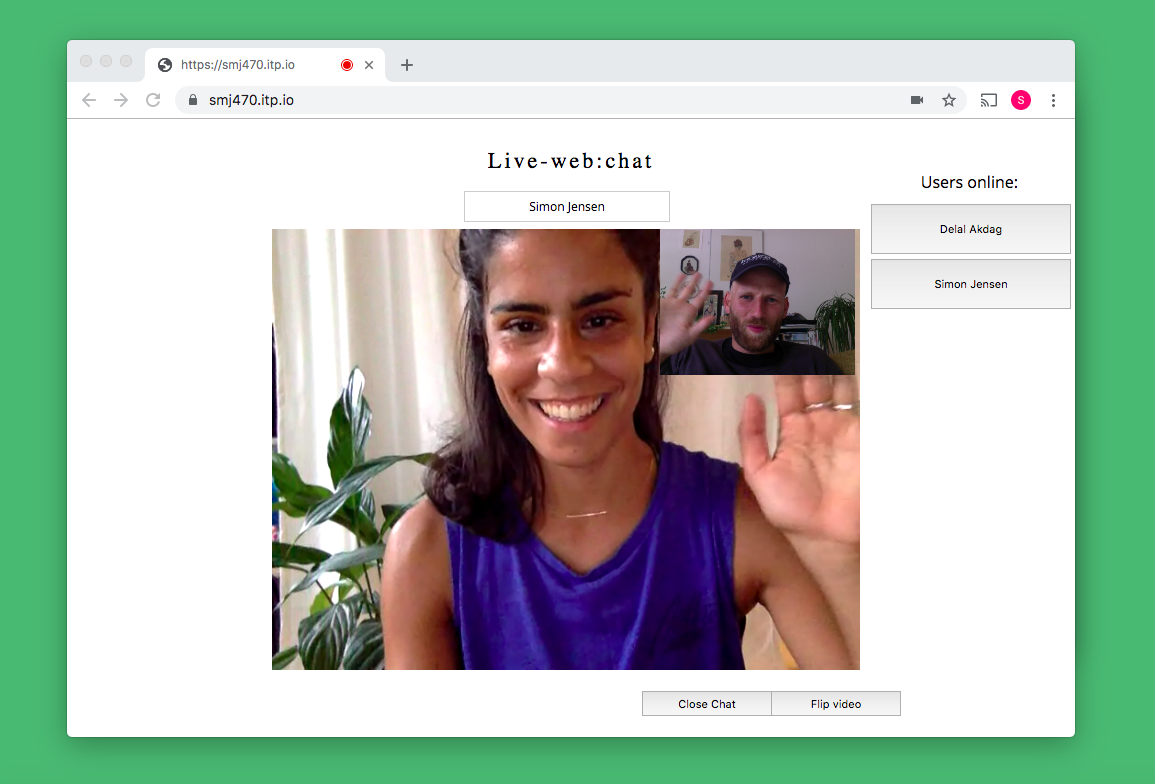
Custom built communication application
Extreme notification service
Mosaic from algorithms
Find popular online words and trends
Masters Thesis, University of Copenhagen